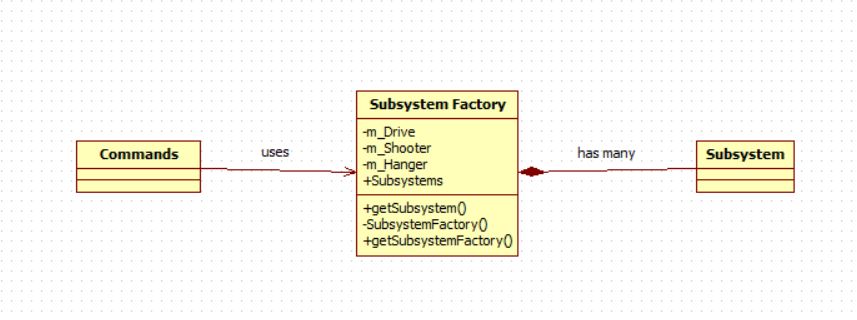
This team develops the software to control Competition Robots as well as demostration robots.
The competition robots have both autonomous and teleop (driver controlled) modes using C++ and XML. The utilize many sensors during autonomous to allow the robot
to perform its operations.
The demonstration robot code is written in RobotC, C# and C++. Currently, we have the following demonstration robots:
- Two (2) that play Connect 4
- Aerial Assist which kicks a big exercise ball
-
- Six (6) Barrel T-Shirt Shooter
- Nite Fury (Steamworks) that shoots wiffle balls and can place gears